
ركزت معظم التغطية الإعلامية للروبوتات البشرية بشكل مفهوم على تصميم الأجهزة. نظرًا لتكرار استخدام مطوريهم لعبارة “الكائنات البشرية ذات الأغراض العامة”، ينبغي إيلاء المزيد من الاهتمام للعنصر الأول. وبعد عقود من الأنظمة ذات الهدف الواحد، سيكون الانتقال إلى أنظمة أكثر عمومية أمرًا مهمًا. نحن لم نصل إلى هناك بعد.
كانت الرغبة في إنتاج ذكاء آلي قادر على الاستغلال الكامل لمجموعة واسعة من الحركة التي فتحها التصميم البشري ذو القدمين موضوعًا رئيسيًا للباحثين. لقد كان استخدام الذكاء الاصطناعي التوليدي في الروبوتات موضوعًا ساخنًا مؤخرًا. بحث جديد من معهد ماساتشوستس للتكنولوجيا يوضح كيف يمكن أن يؤثر الأخير بشكل عميق على الأول.
يعد التدريب أحد أكبر التحديات على الطريق إلى الأنظمة ذات الأغراض العامة. لدينا فهم شامل لأفضل الممارسات لتدريب البشر على أداء وظائف مختلفة. ورغم أن مناهج الروبوتات واعدة، إلا أنها مجزأة. هناك العديد من الأساليب الواعدة، بما في ذلك التعلم المعزز والتقليد، ولكن من المرجح أن تتضمن الحلول المستقبلية مجموعات من هذه الأساليب، تكملها نماذج الذكاء الاصطناعي التوليدية.
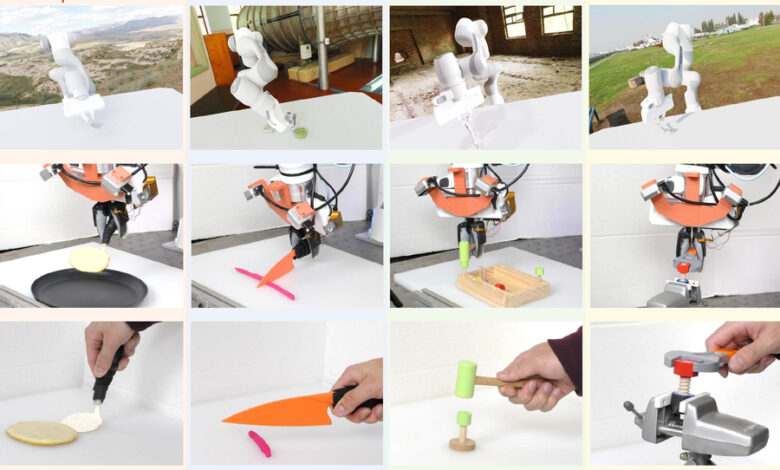
إحدى حالات الاستخدام الرئيسية التي اقترحها فريق معهد ماساتشوستس للتكنولوجيا هي القدرة على جمع المعلومات ذات الصلة من مجموعات البيانات الصغيرة الخاصة بالمهام. كانت الطريقة تسمى تكوين السياسة (PoCo). تتضمن المهام إجراءات مفيدة للروبوت مثل طرق مسمار وتقليب الأشياء باستخدام ملعقة.
تشير المدرسة إلى أن “(الباحثين) يدربون نموذج نشر متميزًا لتعلم استراتيجية أو سياسة لإنجاز مهمة باستخدام مجموعة بيانات محددة”. “ثم يقومون بدمج السياسات التي تعلمتها نماذج الانتشار في سياسة عامة تسمح للروبوت بأداء مهام متعددة في سياقات مختلفة.”
وفقًا لمعهد ماساتشوستس للتكنولوجيا، أدى دمج نماذج البث إلى تحسين أداء المهام بنسبة 20%. يتضمن ذلك القدرة على أداء المهام التي تتطلب أدوات متعددة، بالإضافة إلى التعلم/التكيف مع المهام غير المألوفة. النظام قادر على دمج المعلومات ذات الصلة من مجموعات البيانات المختلفة في سلسلة من الإجراءات اللازمة لإكمال المهمة.
يقول ليروي وانج، المؤلف الرئيسي للدراسة: “إن إحدى مزايا هذا النهج هو أنه يمكننا الجمع بين السياسات للحصول على أفضل ما في كلا العالمين”. “على سبيل المثال، قد تكون السياسة المدربة على بيانات العالم الحقيقي قادرة على تحقيق قدر أكبر من البراعة، في حين أن السياسة المدربة على المحاكاة قد تكون قادرة على تحقيق قدر أكبر من التعميم. »
الهدف من هذا العمل المحدد هو إنشاء أنظمة ذكاء تسمح للروبوتات بتبادل أدوات مختلفة لأداء مهام مختلفة. إن انتشار الأنظمة متعددة الأغراض من شأنه أن يجعل الصناعة أقرب إلى حلم الأغراض العامة.
Source link




